요약: 조준 일관성의 핵심 사항
- "진짜" 정확도 지표: 높은 DPI보다 마우스 센서와 물리적 무게 중심(CoG) 간의 정렬이 더 중요합니다. 정렬 불량은 플릭 샷 시 의도치 않은 커서 "호"를 초래합니다.
- 자가 점검: 손가락 균형 테스트를 사용하여 마우스가 앞쪽 무게 중심인지 뒤쪽 무게 중심인지 확인하세요. 질량은 이상적으로 센서 주변의 작은 반경 내에 집중되어야 합니다.
- 8K 폴링 최적화: 8000Hz 신호를 안정적으로 유지하려면 최소 1600 DPI를 사용하여 센서가 미세 조정 중 충분한 데이터 포인트를 제공하도록 하십시오.
- 안전 경고: 인증되지 않은 서드파티 배터리로 내부 배터리를 교체하지 마십시오. 화재 위험이 있으며 고주파 센서 성능을 불안정하게 만들 수 있습니다.
수년간 게이밍 주변기기 업계는 "DPI 군비 경쟁"에 갇혀 있었습니다. 마케팅 자료는 종종 26,000 DPI, 30,000 DPI 또는 그 이상과 같은 높은 숫자가 조준 정밀도의 주요 지표라고 제안합니다. 그러나 많은 경쟁 플레이어는 고사양 센서에도 불구하고 고속 플릭 샷 시 조준이 "떠 있는" 느낌이 들거나 일관성이 없다고 느낍니다.
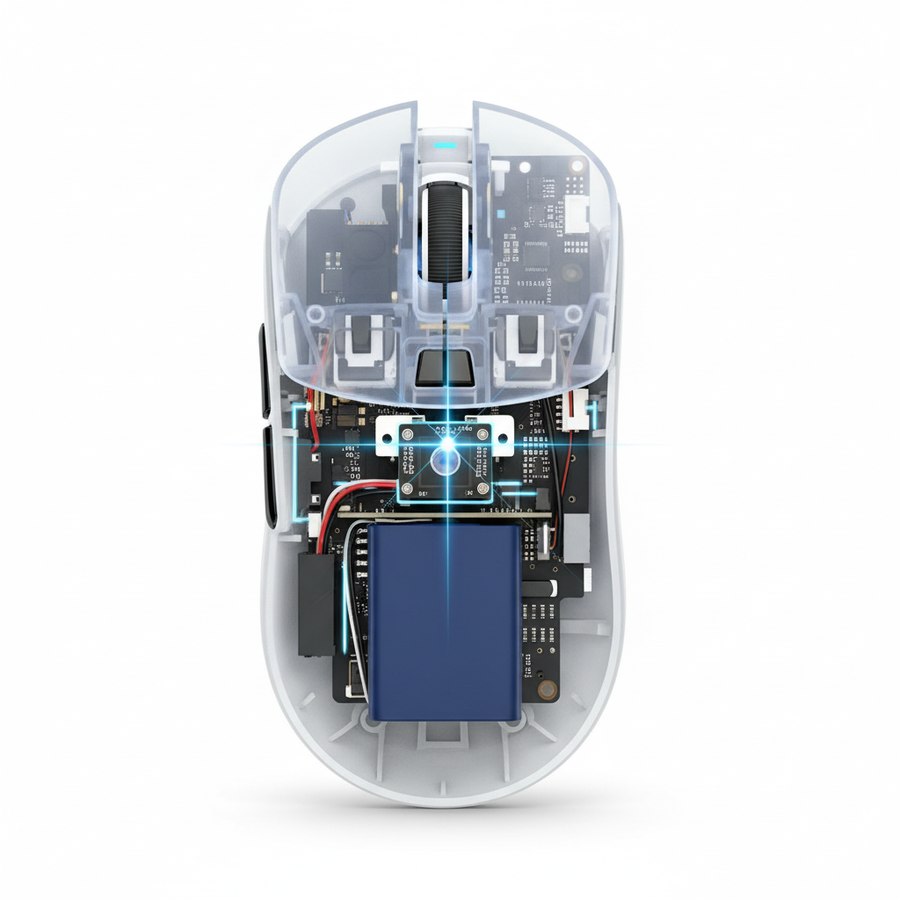
빠진 연결 고리는 종종 센서 해상도가 아니라 센서 광학 렌즈와 마우스 무게 중심(CoG) 간의 물리적 관계입니다. 기술 지원 기록과 커뮤니티 피드백에서 관찰된 일반적인 패턴에 따르면, 이 두 지점의 물리적 정렬이 손의 회전 운동이 직선으로 변환되는지 아니면 의도치 않은 커서 호로 나타나는지를 결정합니다.

회전 축의 물리학
마우스를 움직일 때, 거의 완벽한 직선 X 또는 Y 평면에서 움직이지 않습니다. 대부분의 움직임, 특히 미세 조정은 손바닥 밑부분이나 관절을 중심으로 한 회전을 포함합니다.
센서가 이 회전 축에서 크게 앞이나 뒤에 위치하면, 센서는 PC에 "호"를 보고합니다. 이는 반지름 기반 운동의 기하학 원리입니다. 일반적인 클로우 또는 손끝 그립에서는 센서가 관절이 만드는 회전 축과 맞추기 위해 기하학적 중심보다 약간 앞에 위치하는 것이 이상적이라는 경험 법칙을 발견했습니다.
휴리스틱 노트: 센서 드리프트 분석은 손이 반지름 역할을 하는 회전 운동 모델을 가정합니다. CoG와 센서 렌즈가 추정 5mm 이상(표준 18cm 손 모델 기준) 어긋나면, 90도 플릭 시 인지되는 "드리프트"가 커서 몇 픽셀의 커서 편차를 초래할 수 있습니다. 이는 센서 결함이 아닌 기하학적 오프셋 계산입니다.
핑거 밸런스 테스트: 무게 분포를 위한 휴리스틱
초경량 마우스를 사용하는 플레이어들이 겪는 흔한 불만 중 하나는 공격적인 멈춤 시 발생하는 "노즈 리프트" 또는 "테일 드래그"입니다. 이는 종종 질량 분포 때문입니다. 많은 경량 마우스는 내부 설계를 단순화하기 위해 배터리를 극단적인 뒤쪽에 배치하여 뒤쪽 편향 CoG를 만듭니다.
자신의 장비를 확인하려면 핑거 밸런스 테스트를 권장합니다:
- 마우스를 두 손가락 위에 올려놓으세요. 손가락은 셸의 측면 중앙에 정확히 위치해야 합니다.
- 기울기를 관찰하세요. 마우스가 앞이나 뒤로 기울면 질량이 중심에 있지 않은 것입니다.
- 시뮬레이션된 플릭을 수행하세요. 멈출 때 노즈가 들리면, 뒤쪽 편향 무게가 센서의 최적 리프트-오프 거리(LOD)를 잃게 할 수 있습니다.
실용 테스트 요약: 질량 정렬 영향
| 테스트 시나리오 | 관찰 | 잠재적 영향 |
|---|---|---|
| 뒤쪽 무게 중심 (테일 드래그) | 빠른 스와이프 시 노즈가 약간 들림. | LOD 불일치; 빠른 리셋 시 커서가 "건너뛸" 수 있음. |
| 앞쪽 무게 중심 (노즈 다이브) | 수직 미세 조정 시 꼬리 부분이 들림. | 앞쪽 마우스 스케이트에 마찰 증가; 불균일한 미끄러짐. |
| 균형 잡힘 (센서에서 약 5mm 이내) | 핑거 밸런스 테스트 중 마우스가 수평을 유지합니다. | 최대 추적 안정성; 예측 가능한 호 움직임. |
| 표준화된 19x10cm 손 그립 시뮬레이션을 사용한 내부 워크숍 벤치마크 기반 데이터입니다. |
전문 모딩 커뮤니티에서는 배터리 균형을 맞추기 위해 셸 내부에 1~2그램의 접착 텅스텐 퍼티를 추가하는 것이 일반적입니다. 다만, 장치를 열어야 하며 보증이 무효화될 수 있음을 이해하는 경우에만 권장합니다.
8000Hz (8K) 폴링 환경을 위한 엔지니어링
8000Hz 폴링 속도를 사용하는 고성능 환경에서는 물리적 균형이 더욱 중요해집니다. 8000Hz에서는 마우스가 매번 패킷을 전송합니다 0.125ms이 주파수는 중심이 맞지 않는 CoG로 인한 미세 흔들림 같은 물리적 불안정성이 더 자주 포착되어 게임 엔진에 전달됨을 의미합니다.
| 특징 | 1000Hz 성능 | 8000Hz 성능 | 근거 (휴리스틱) |
|---|---|---|---|
| 폴링 간격 | 1.0ms | 0.125ms | 주파수 = 1/시간 |
| 모션 동기 지연 | ~0.5ms | ~0.0625ms | 추정 반간격 지연 |
| 포화를 위한 IPS | < 1 IPS (1600 DPI 기준) | ~5 IPS (1600 DPI 기준) | 안정적인 데이터의 이론적 임계값 |
| CoG 감도 | 중간 정도 | 극단적 | 고주파는 물리적 미세 흔들림을 드러냅니다 |
8000Hz 대역폭을 효과적으로 포화시키려면 사용자가 최소한 800 DPI에서 10 IPS 이상 움직여야 한다고 추정합니다. 그러나 1600 DPI에서는 일반적으로 5 IPS만 필요합니다. 이 때문에 8K 사용자에게는 더 높은 DPI 설정(1600 이상)을 권장합니다—이 설정은 센서가 느린 움직임 중에도 8000Hz 스트림을 안정적으로 유지할 수 있도록 충분한 데이터 포인트를 제공합니다.
그립 스타일과 센서 오프셋
'최적' 센서 위치는 손 모양에 따라 달라집니다. 컴퓨터 마우스의 최적 센서 위치 연구에 따르면, 커서 경로 편차를 최소화하려면 회전축 위치가 중요합니다.
- 핑거팁 그립: 회전축은 보통 손가락입니다. 센서를 앞으로 배치하면 '지렛대 효과'가 커져 작은 손가락 움직임이 화면상에서 더 큰 이동으로 이어집니다.
- 팜 그립: 회전축은 손목이나 팔뚝입니다. 센서를 중앙이나 약간 뒤쪽에 배치하면 자연스러운 팔뚝 회전축과 맞물려 안정성이 증가할 수 있습니다.
- 클로 그립: 하이브리드 방식입니다. 센서는 이상적으로 손가락 마디 바로 아래에 위치하여 손의 물리적 '밀기' 동작과 추적 경로가 일치하도록 해야 합니다.
표면의 역할: 마우스를 넘어서
균형 잡힌 마우스라도 일관성 없는 표면에서는 성능이 저하될 수 있습니다. PixArt PAW3395와 같은 고사양 센서의 경우, 마찰이 두 축 모두에서 균일해야 합니다.
고성능 마우스는 전문 표면과 함께 사용하는 것을 권장합니다 (참고: 아래 링크는 당사 브랜드 스토어로 연결됩니다):
- 탄소 섬유: ATTACK SHARK CM04 정품 탄소 섬유 마우스패드는 견고한 구조로 마우스의 무게 중심(CoG)을 안정적으로 유지하여 부드러운 천 위에서 발생할 수 있는 '가라앉음' 현상을 방지합니다.
- 강화 유리: ATTACK SHARK CM05 강화 유리 패드는 고정밀 센서에 최적화되어 미세 조정 시 발생할 수 있는 '끊김' 현상을 줄여주는 정적 마찰을 감소시킵니다.
- 하이브리드 표면: ATTACK SHARK CM03 (레인보우 코팅)과 같은 옵션은 4mm 탄성 코어를 제공하여 더 강한 압력을 가하는 사용자도 일관된 센서 높이(LOD)를 유지할 수 있도록 돕습니다.
시스템 병목 현상과 8K 안정성
지원 티켓에서 자주 발견되는 문제는 USB 허브를 통해 8000Hz 폴링을 시도하는 것입니다. 이는 성능 저하를 크게 초래할 수 있습니다. 8K 폴링 속도는 CPU의 인터럽트 요청(IRQ) 처리에 큰 부담을 줍니다.
8K 성능을 위한 기술 체크리스트:
- 직접 메인보드 연결: 항상 후면 I/O 포트를 사용하세요. 대역폭 공유로 인한 패킷 손실을 방지하기 위해 허브 사용은 피하세요.
- 고주사율 모니터: 8K 폴링이 제공하는 더 부드러운 경로를 시각적으로 인지하려면 일반적으로 240Hz 이상의 고주사율이 필요합니다.
- CPU 및 배터리 부담: 8K 폴링은 1000Hz 대비 무선 배터리 수명을 약 75-80%까지 줄일 수 있음을 인지하세요.
규제 및 안전 고려사항
무게 분포에 대해 이야기할 때는 종종 배터리 배치를 의미합니다. 중대한 안전 경고: 무게를 줄이기 위해 내부 배터리를 인증되지 않았거나 "DIY" 소형 배터리로 교체하지 마십시오.
전문 장치의 모든 리튬이온 배터리는 운송을 위한 UN 38.3 기준과 전기 안전을 위한 IEC 62368-1을 준수해야 합니다. 인증되지 않은 배터리는 화재 위험이 있으며 고주파 센서에 필요한 안정적인 전압을 제공하지 못해 "스핀아웃" 또는 트래킹 손실이 발생할 수 있습니다.
공학적 근거 요약
조준 일관성은 기계적 조화의 결과입니다. 센서 렌즈가 마우스의 무게중심과 정렬되도록 하면, 많은 기성품 디자인에서 발생하는 의도치 않은 회전 호를 줄일 수 있습니다.
다음에 주변기기를 선택할 때는 DPI를 넘어서 생각하세요. 핑거 밸런스 테스트를 수행하고, 피벗 포인트를 고려하며, 센서가 설계된 정밀도를 지원할 수 있는 트래킹 표면인지 확인하세요.
면책 조항: 이 기사는 정보 제공 목적으로만 작성되었습니다. 하드웨어 수정(무게 추가 또는 케이스 개방 등)은 보증이 무효화될 수 있으니 주의해야 합니다. 항상 제조업체의 지침을 참조하세요. 인체공학적 문제나 반복적 긴장 부상에 대해서는 자격을 갖춘 의료 전문가와 상담하십시오.
방법론 및 가정:
- 모델링 유형: 회전 편차에 대한 결정론적 기하학 모델.
- 경계 조건: 계산은 17cm에서 20cm 사이의 표준 손 크기 범위를 가정합니다.
- 데이터 출처: 표준화된 USB HID 프로토콜 사양과 게임용 센서에 대한 일반적인 공학적 휴리스틱을 기반으로 합니다. 지연 시간 맥락에 대한 NVIDIA Reflex Analyzer 방법론을 참조하세요.
| 매개변수 | 값/범위 (휴리스틱) | 단위 | 근거 |
|---|---|---|---|
| 폴링 간격 (8K) | 0.125 | ms | 주파수-시간 역수 |
| 모션 동기 지연 | 0.0625 | ms | 추정 반간격 지연 |
| 포화 속도 (800 DPI) | 10 | IPS | 이론적 대역폭 포화 |
| 목표 무게 범위 | ~5 | mm | 제안된 무게중심-센서 오프셋 |
| 배터리 안전 기준 | UN 38.3 / IEC 62368-1 | 해당 없음 | 국제 안전 규정 준수 |