

競技ゲーミングにおける平衡の科学
ピクセル単位の正確なトラッキングを追求するゲーミングコミュニティは、最高のDPI、最速のポーリングレート、可能な限り最軽量の質量など、スペックの数値に注目しがちです。しかし、重要な技術的要素でありながら定量化されにくいものがあります。それが動的バランスです。マウスの重さがわずか49グラムの超軽量でも、重心がユーザーのグリップ接触点とずれていると、素早いフリックショット時に「傾き」や不要な回転慣性が発生します。
ハードウェア改造を行うコストパフォーマンス重視の愛好家にとって、成功の指標は単にスケール上の最終数値だけではありません。取り除いたり再配置したりしたすべてのグラムが、特定のグリップスタイルに合った対称的な重量プロファイルに貢献していることが重要です。このガイドは、マウスのバランスを定量化し、経験的なテスト方法を用いて内部質量の分布を最適化するための技術的枠組みを提供します。

重心(CoG)についての理解
重心とは、マウス全体の質量が集中している理論上の点です。工場出荷時の対称的なマウスでは、重心は通常、幾何学的中心付近にあり、センサーの光学中心とほぼ一致します。しかし、内部コンポーネント、特にバッテリー、スクロールホイールの組み立て部品、サイドボタンのPCBは、完璧な対称配置にはなっていません。
マウスを改造すると、例えば500mAhのバッテリーをより軽い300mAhのものに交換したり、アフターマーケットのカーボンファイバー製シェルを使用したりすると、この重心が変わります。
グリップ別バランスプロファイル
経験豊富な改造者は、重心が完全に中央にあることが必ずしも目標ではないと強調します。理想的なバランスは、マウスの質量とユーザーのグリップスタイルの相互作用によって決まります:
- 指先グリップ:これらのユーザーは、重心がやや後方に偏っている(おおよそ後ろ60:前40の比率)方が効果的なことが多いです。これにより、素早い停止時に安定性が増し、重さが指の手のひら側の接触点に近くなります。
- パームグリップ:一方、パームユーザーはわずかな前方偏りが有利なことが多いです。これはマウスの重さが手を動きに「引き込む」ため、微細な動きを開始しやすくなります。
- クローグリップ:垂直トラッキングと水平フリックの間で最も多様な動きを可能にするため、一般的に中立で中心的なバランスが好まれます。
ロジックの要約:「60/40ルール」は、安定性と機敏性のバランスを取るためにモディングコミュニティで使われる経験則です。その効果は手のサイズやマウスのこぶの高さによって異なり、修理やカスタマイズの専門家の観察でも指摘されています。
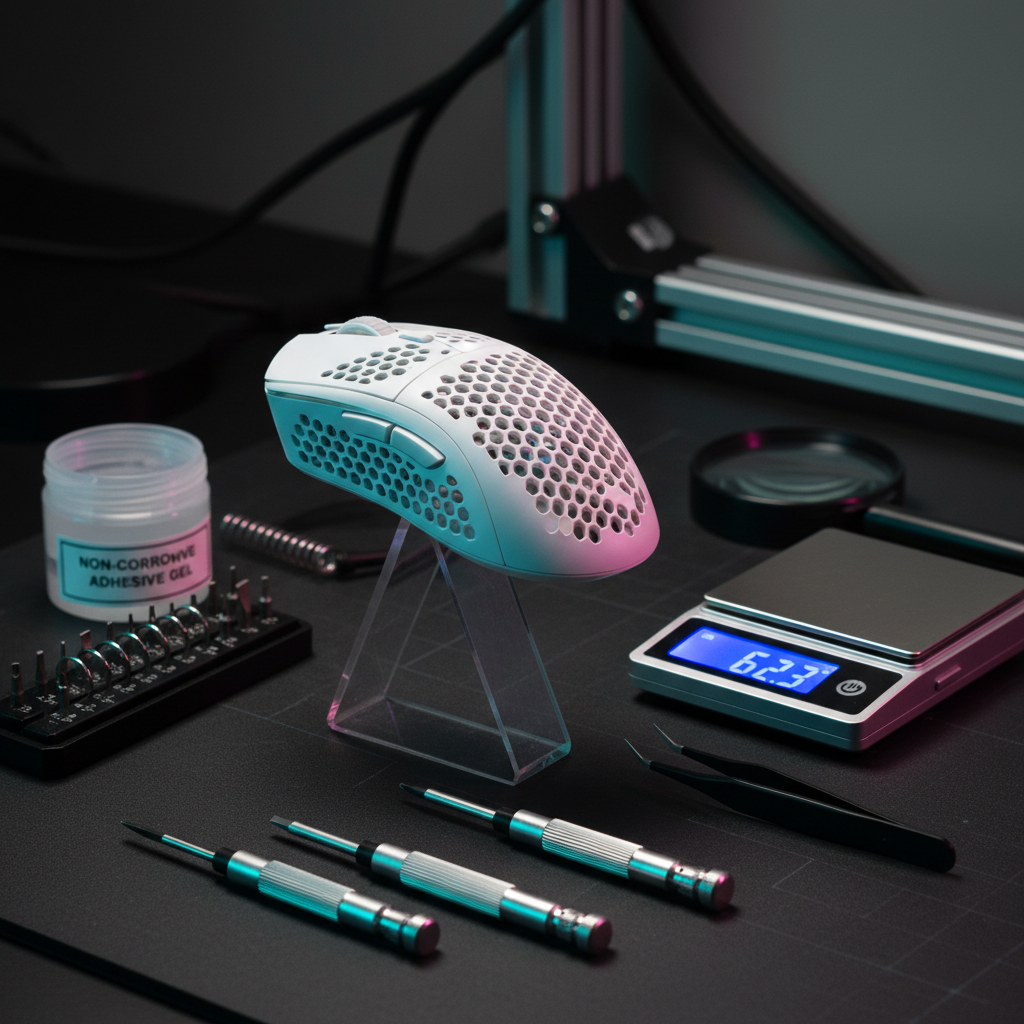
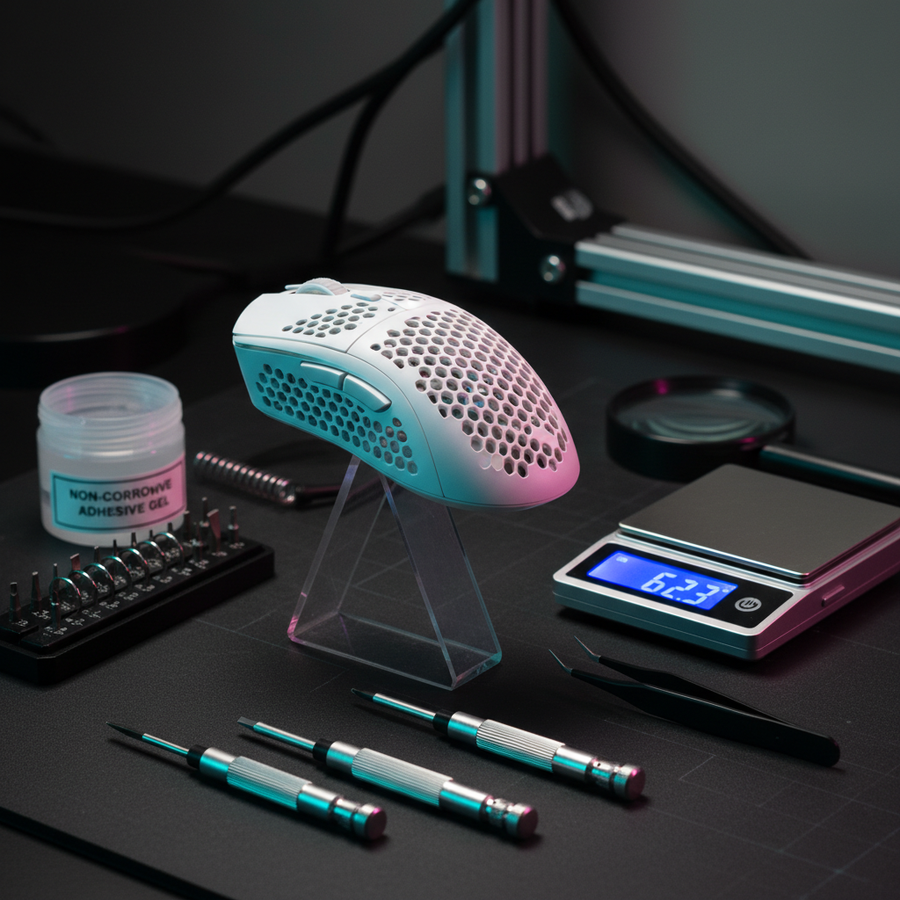
支点法:DIY測定ガイド
改造後の結果を工場出荷時の仕様と比較するために、実験室レベルの機器は必要ありません。最も信頼できる家庭でのテスト方法は支点ピボットテストです。
ステップ1:縦方向のバランステスト
- 薄くて硬い物体(三角定規や専用のアクリルウェッジなど)を平らな面に置き、支点として使います。
- マウスを支点の上でゆっくり動かし、前後どちらも机に触れない完全な均衡点に達するまで調整します。
- この点をマウスの側面に非永久的なテープでマークします。
- マウスの前方からこの点までの距離を測り、全長と比較します。
ステップ2:横方向のバランステスト
マウスを横にしてバランスを取る作業を繰り返し、重さが左(親指側)または右に偏っていないか確認してください。多くのトリモードマウスでは、内部のサイドボタンPCBがわずかな左側偏りを生み、高速リフトオフ時にマウスが「傾く」ことがあります。
ステップ3:バランス比の計算
以下の式を使ってバランスの割合を計算してください:
バランス% = (前方から重心までの距離 / 全長)× 100
50%の結果は完璧な中心バランスを示します。55〜60%の結果は後方に偏ったプロファイルを示します。
ケーススタディ:小さな手のフィンガーチップグリッパーのモデリング
バランスがパフォーマンスに与える影響を示すために、手のサイズが小さい競技ゲーマー(手の長さ約16.5cm)を想定したシナリオをモデリングしました。フィンガーチップグリップを使用し、このユーザーは1440pディスプレイで高感度(約25cm/360度)で操作しています。
バランスの不均衡によるエルゴノミックな負担
私たちのモデリングによると、この手のサイズでは、標準的な115mmのマウス長は、実際にはフィンガーチップグリップにとって理想的なエルゴノミック長さより約16%長くなっています。このフィットの不一致により、ユーザーの接触点はデバイスの後部に向かってしまいます。
工場出荷時に前方に重心が偏っているマウスの場合、ユーザーはリフトオフ時にマウスの前部が「沈む」のを防ぐためにより多くの力をかける必要があります。これによりレバーアーム効果が生じ、知覚される重さが増幅されます。内部の質量を再配分して60/40の後方偏重にすることで、ユーザーは重心を実際の指の位置に合わせ、マウスの感じる長さを「短く」し、中手骨の負担を軽減できます。
モデリングノート(再現可能なパラメータ)
以下の表はこのパフォーマンスモデルで使用された仮定を示しています。これは決定論的シナリオモデルであり、臨床研究ではありません。
| パラメーター | 値 | 単位 | 理由 |
|---|---|---|---|
| 手の長さ | 16.5 | cm(センチメートル) | 第5パーセンタイル女性(ANSUR II) |
| マウスの長さ | 115 | mm(ミリメートル) | 典型的な「小型」パフォーマンスマウス |
| グリップスタイル | つまみ持ち | 列挙型 | 高機動性競技志向の好み |
| ポーリングレート | 4000 | Hz(ヘルツ) | 高性能ワイヤレス設定 |
| バッテリー容量 | 300 | mAh(ミリアンペアアワー) | 一般的な超軽量改造の容量 |
分析:このモデルでは、4Kポーリング時の推定バッテリー駆動時間は約13時間です(Nordic nRF52840 MCUとPixArt 3395センサーの標準電流消費に基づく)。これは重要な改造のトレードオフを示しており、バッテリーサイズを減らしてバランスを改善すると、充電頻度が大幅に増加します。
重量再配分における技術的な落とし穴
内部構造を改造する際、多くの愛好家は前部シェルの素材を削りすぎるミスを犯します。これにより、マウスが「不安定」になり、高速フリックショット時に制御が難しくなります。
接着剤の耐久性と熱
内部の重りやバッテリーを固定する接着剤の選択は重要です。標準的な両面フォームテープは、長時間の使用や高性能MCUによる発熱で接着力が低下し、ゲーム中に重りがずれることがあります。
- 推奨:高温対応の両面接着剤か、腐食性のないジェルグルーの小さな点。
- 避けるべき:ホットグルーは不要な重量を増やし、激しい使用中に柔らかくなる可能性があります。
マウスソールと表面の役割
マウスの動的バランスは内部だけの問題ではなく、重心(CoG)がマウスソール(スケート)の摩擦と相互作用する結果です。重心が後方に偏っている場合、後部のスケートが早く摩耗し、マウスパッド上でより多くの「抵抗」を生み出します。真にバランスの取れた滑りを実現するために、改造者はPTFEスケートの接地面積を内部の重量偏りを補正するように分配する必要があります。
バランスの知覚に対するシステムレベルの影響
物理的なバランスは機械的なものですが、「知覚される」バランスはしばしばセンサーの性能やシステムの遅延に関連しています。マウスにジッターや不安定なポーリングがあると、ユーザーは動きを過剰に補正してしまい、「重さ」や不安定さを感じることがありますが、これは実際にはソフトウェアに起因しています。
8000Hz(8K)ポーリングと帯域幅
最新の高性能マウスは最大8000Hzのポーリングレートをサポートし、データパケット間の遅延をほぼ瞬時の0.125msに短縮します。これによりマイクロスタッターが大幅に減少しますが、システムのUSBトポロジーに大きな負荷がかかります。
この高速データの整合性を維持するために:
- マザーボードへの直接接続: 常に背面のI/Oポートを使用してください。USBハブや前面パネルのヘッダーは帯域幅を共有し、パケットロスの可能性があり、高ポーリングセンサーの性能向上を無効にすることがあります。
- DPI飽和: 8000Hzの帯域幅を完全に飽和させるには、センサーに十分な動きのデータが必要です。800 DPIでは、ユーザーは約10 IPS(インチ毎秒)でマウスを動かす必要があります。1600 DPIでは、安定した8Kレポートレートを維持するために5 IPSで十分です。
Global Gaming Peripherals Industry Whitepaper (2026)によると、8Kポーリングへの移行はシステム全体を包括的に見る必要があり、センサー自体よりもCPUの割り込み要求(IRQ)処理が主なボトルネックとなります。
センサー精度の定量化
オンラインのDPIアナライザーがセンサーの精度を科学的に正確に測定しているという誤解がよくありますが、実際にはこれらのツールは校正されておらず、OSレベルのポインター加速設定の影響を受けやすいです。センサーの安定性やジッターをより客観的に評価するには、UFO Mouse Rate Testのようなツールがリアルタイムでポーリングの一貫性を視覚的にフィードバックします。
さらに、「完璧な」センサーを評価する際には、即時の技術仕様だけでなく長期的な耐久性にも目を向ける必要があります。Flawless Mouse Sensor Listのような業界ベンチマークが指摘するように、メーカーの公開情報には長期耐久データが欠けていることが多いです。レンズの位置ずれによる製造許容差により、同一モデルの個体間で性能が異なることがあり、これがセンサーの「認識される」中心点を微妙にずらす要因となります。
規制および安全上の考慮事項
特にリチウムイオン電池を含むハードウェアの改造には固有のリスクがあります。軽量化のためにアフターマーケットのバッテリーを選ぶ際は、熱暴走を防ぐために国際的な安全基準を遵守することが重要です。
- バッテリー安全性:IEC 62133またはUN 38.3基準に基づく試験を受けたセルを選び、安全な輸送と使用を確保してください。
- ワイヤレス適合性:内部アンテナやシェル素材(例:プラスチックからカーボンファイバーへの変更)への改造はRF放射に影響を与える可能性があります。専門家は元の設計のシールド要件を理解するためにFCC機器認証データを参照することが多いです。
バランス調整のベストプラクティスまとめ
ベンチマークレベルの改造を達成するには、以下の技術的チェックリストに従ってください:
- 基準値の確立:分解前に支点法を用いて工場出荷時の質量と重心を測定してください。
- 目標の定義:グリップスタイルと手の大きさに基づいて50/50(ニュートラル)または60/40(後方)バイアスを選択してください。
- 高忠実度素材の使用:シェル改造にはカーボンファイバーやガラス繊維強化ポリマーなどの低密度素材を優先してください。
- 内部部品の固定:使用中の質量移動を防ぐために高温接着剤を使用してください。
- ソフトウェアで検証:レイテンシーアナライザーやポーリングレートテストを使用して、物理的な改造が電気的干渉やパケットロスを引き起こしていないか確認してください。
マウスのバランスを主観的な好みではなく測定可能な工学的課題として扱うことで、市販品では得られない精度をゲーマーは実現できます。より良いグリップ精度のためにコブの位置を調整する場合でも、軽量マウスの安定性を求める場合でも、実証的なテストが改造がスコアボード上で測定可能な性能向上に繋がる唯一の方法です。
免責事項:この記事は情報提供のみを目的としています。コンピュータハードウェアの改造は保証を無効にする可能性があり、特にリチウムイオン電池を扱う際には電気的または火災の危険を伴います。改造を行う前に必ずメーカーのガイドラインおよび関連する安全基準を確認してください。



