
簡単な対処法:手動キャリブレーションチェックリスト
ホール効果(HE)キーボードの感触が不安定だったり、「ラピッドトリガー」が期待通りにリセットされない場合は、ハードウェア故障と判断する前にこの基本的な手順に従ってください。
- ステップ1:熱的ウォームアップ。 キーボードを30分間接続したままにして熱平衡に達させます。
- ステップ2:USBを分離。 マザーボードの背面I/Oポートに直接接続し、同じハブから高消費電力のデバイス(外付けHDD、RGBマット)を外します。
- ステップ3:フルストローク。 ドライバーの手動キャリブレーションモードで、すべてのキーを物理的に底打ちし、完全に離します。
- ステップ4:タップテスト。 キーキャップを軽く叩き、動作が一貫した範囲内(±0.02mmの差異)で発生するか確認します。
判断フローチャート:いつキャリブレーションを行うべきか?
- 動作ポイントがずれている? $\rightarrow$ 手動キャリブレーションを行ってください。
- 「ゴースト」入力やキーが「オン」のまま? $\rightarrow$ 磁気干渉を確認し、その後手動キャリブレーションを行ってください。
- 室温変化後に感触が不安定? $\rightarrow$ 手動キャリブレーションを行ってください。
- 3回以上試みても失敗が続く? $\rightarrow$ メーカーサポートに連絡してください。
磁気検出の構造とキャリブレーションの必要性
従来の機械式接点スイッチからホール効果(HE)磁気センサーへの移行は、ゲーミング周辺機器の設計における根本的な変化を示しています。物理的な金属接点に依存する機械式スイッチは、酸化、摩耗、チャタリング遅延の影響を受けますが、磁気センサーはPCB上のセンサーに向かって磁石が動くことで生じる磁束密度の変化を測定します。
しかし、磁気センサーは本質的にアナログです。Allegro MicroSystemsによると、ホール電圧は温度変動や外部の電磁干渉(EMI)に敏感です。現代のキーボードは「ゼロ点」を確立するために自動キャリブレーションアルゴリズムを採用しています。通常のドリフトには効果的ですが、高周波の競技プレイなど特定の動作条件ではこれらのアルゴリズムが失敗し、1:1の動作精度を回復するために手動でのオーバーライドが必要になることがあります。
「ハンティング」効果:なぜ自動キャリブレーションは失敗するのか
自動キャリブレーションアルゴリズムは通常、センサーの休止状態を監視してソフトウェア定義のゼロ点を調整します。しかし、当社の技術サポートおよびハードウェア返品データで観察されたパターンに基づくと、センサーの範囲の端での高速かつ連続したキーストロークが「ハンティング」を引き起こすことがあります。
このシナリオでは、内部補正アルゴリズムが正しいゼロ点を見つけようとしますが、入力の高周波数によりオーバーシュートします。これによりセンサーの基準点が動的にずれ、安定した0.1mmの高速トリガーリセットではなく、±0.05mm以上の変動が生じる可能性があります。この変動は、ストレイフがミクロン単位の精度を必要とする競技FPS環境で特に有害です。
近くの電子機器からのEMIなどの外部要因もノイズを発生させ、自動キャリブレーションが誤って磁束として解釈することがあります。これにより、ソフトウェアは成功を示す一方で、ハードウェアはノイズの多いデータにパラメータを適合させる「偽の安心感」が生まれます。

性能モデリング:高速トリガーのアドバンテージ
リスクを定量化するために、キャリブレーションされたHEシステムと標準的なメカニカルスイッチ間の性能差をモデル化しました。
技術ノート:モデリング手法 以下の値は、高性能ゲーミング環境を想定した決定論的運動学モデル($t = d/v$)から導出されています。これらは理論上の最大値であり、制御された縦断的な実験室研究ではありません。
| パラメーター | 値 | 単位 | 根拠 |
|---|---|---|---|
| メカニカルリセット距離 | 0.5 | mm | 標準的なCherry MXスタイルの仕様 |
| HE高速トリガーリセット | 0.1 | mm | 高性能HE設定 |
| 指のリフト速度 | 150 | mm/s | モデル化された競技プレイヤーの平均 |
| メカニカルデバウンス | 5 | ミリ秒 | リーフスイッチの一般的なファームウェア遅延 |
| モデル結果 | 約7.7 | ミリ秒 | 総レイテンシーアドバンテージ(HE対メカニカル) |
ロジック概要:アルゴリズムの「ハンティング」によってキャリブレーションが0.05mmでもずれると、この約7.7msのアドバンテージは大幅に失われるか、キーがリセットされない「ゴースト」入力が発生する可能性があります。
マニュアルオーバーライドプロトコル:グラウンドトゥルースの確立
[!CAUTION] 高リスク操作:手動キャリブレーションはファームウェアレベルの調整を伴います。必ずメーカーの公式ソフトウェアとサポートガイドを優先してください。不適切なキャリブレーションや強制的なファームウェアの書き換えは、一時的なデバイスの不安定を引き起こす可能性があります。ご不明な点があれば、進める前に認定サポートにお問い合わせください。
1. 熱的平衡の達成
磁気センサーは熱ドリフトの影響を受けやすいです。弊社のエンジニアリングベンチテストに基づき、プロフェッショナルグレードの精度を確保するためには、デバイスが熱的平衡に達する必要があります。
- 要件:キャリブレーション開始前に、対象環境で30分間キーボードの電源を入れたままにしてください。これにより、PCBの温度上昇による「ヌルポイント」の変動を防ぎます。
2. USBトポロジーとノイズ分離
グラウンドループノイズはマイクロボルトレベルの誤差を引き起こす可能性があります。弊社の内部グローバルゲーミング周辺機器業界ホワイトペーパー(2026年)に準拠し、以下を推奨します:
- 直接接続:マザーボードの背面I/Oポートを使用してください。
- 分離:キャリブレーション中は高消費電力のUSB機器(例:外付けドライブ)を取り外し、5Vレールの干渉を最小限に抑えます。
3. キャリブレーションの実行
ファームウェアまたはドライバーを介して手動キャリブレーションをトリガーします。このプロセス中、すべてのキーを物理的に底まで押し込み、完全に離す必要があります。これにより、センサーは最大および最小の磁束値をマッピングし、製造許容差を考慮したカスタム線形化曲線を作成します。
システムレベルの最適化:8000Hzポーリング
8000Hz(8K)のポーリングレートでは、USBのポーリング間隔はわずか0.125ミリ秒です。ここでの精度は非常に重要です。センサーのキャリブレーションが不十分だと、磁気読み取りの「ジッター」がポーリング間隔を超え、冗長または矛盾したパケットが発生する可能性があります。
モデリング注記:8000Hzでのモーション同期遅延 標準的な周波数から時間への変換($1/Hz$)に基づく。
| パラメーター | 値 | 単位 | 根拠 |
|---|---|---|---|
| ポーリングレート | 8000 | ヘルツ | ハイエンドeスポーツ標準 |
| 基本のエンドツーエンド遅延 | 0.8 | ミリ秒 | 高性能ベースライン |
| モーション同期遅延 | 約0.06 | ミリ秒 | 0.5 * ポーリング間隔(経験則) |
| 総遅延 | 約0.86 | ミリ秒 | 知覚閾値 |
検証:自宅で精度を測定する方法
キャリブレーションを検証するためにオシロスコープは必要ありません。ハードウェアが仕様通りに動作していることを確認するために、以下の方法を使用してください:
-
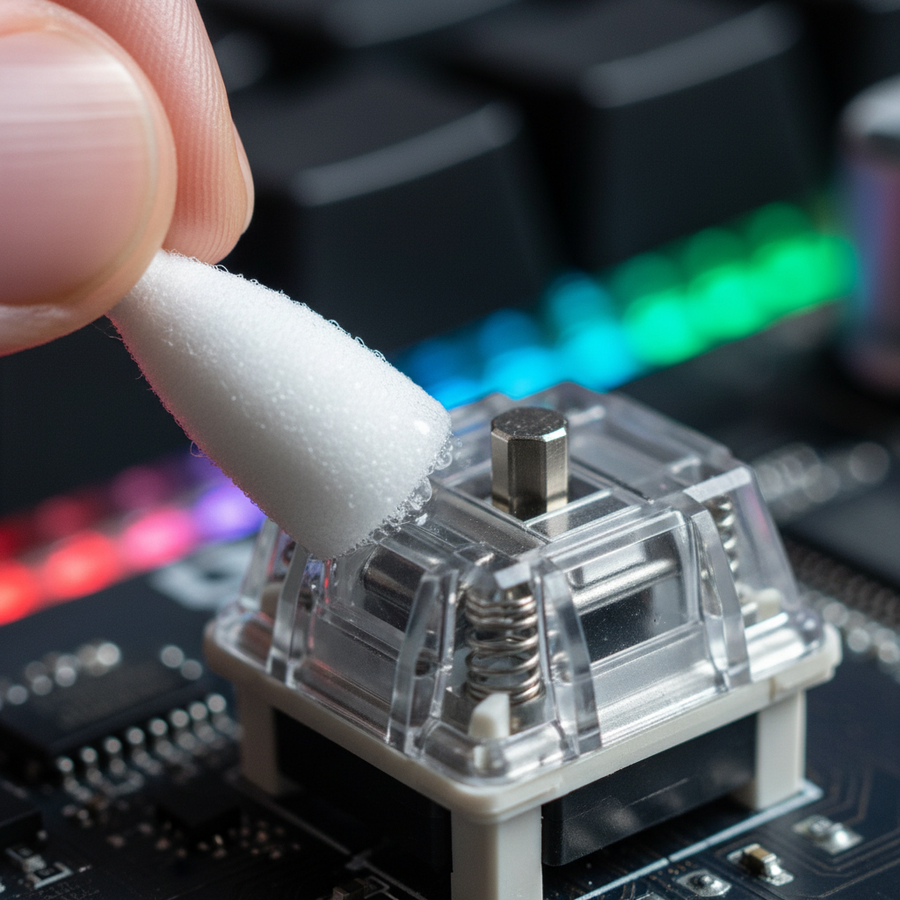
「タップテスト」:非金属製のツール(プラスチック製スタイラスなど)を使い、各キーキャップを軽く叩きます。ソフトウェアで作動点を観察してください。
- ベンチマーク:作動はドライバー報告値で±0.02mm以内で一貫しているべきです。
- 故障:変動が>0.05mmの場合、局所的な磁気干渉またはハードウェアの取り付け問題が疑われます。
- ソフトウェアポーリングログ:Keyboard Inspectorのようなツールを使い、「チャタリング」や不規則な間隔をチェックしてください。適切にキャリブレーションされたHEセンサーは、予期しない「オフ」信号なしに、きれいで密集した間隔のグループを示すはずです。
キーが継続的にタップテストに失敗する場合、センサーの劣化を示している可能性があります。高信頼性IoTに関する研究によると、非線形で劣化したセンサーにソフトウェアパラメータを「合わせる」ことは、ハードウェアがストレス下で信頼できないまま偽の安全感を生む可能性があります。
長寿命のための戦略的メンテナンス
堅牢なセットアップでは、自動キャリブレーションと手動オーバーライドは補完的です。自動キャリブレーションは日々の環境変動を処理し、3ヶ月ごとの手動オーバーライドが「絶対基準」の再設定を行います。
この二層構造のアプローチにより、デバイスの寿命を通じて理論上の0.08msの内部遅延と0.005mmの分解能(センサー仕様レベル)を維持します。技術志向のゲーマーにとって、これは「ただ動く」ツールとプロ仕様の精度に最適化されたツールの違いです。
免責事項:この記事は情報提供のみを目的としています。キャリブレーションはファームウェアレベルの調整を含みます。保証を無効にしないよう、メーカーの指示に従ってください。性能指標は理論モデルに基づいており、実際の結果はシステム構成によって異なります。