要約:エイムの一貫性の基本
- 「本当の」精度指標:高DPIよりも、マウスセンサーと物理的な重心(CoG)の整列の方が重要です。ずれがあると、フリックショット時に意図しないカーソルの「弧」が発生しやすくなります。
- セルフチェック:フィンガーバランステストを使って、マウスが前重心か後重心かを確認しましょう。質量は理想的にはセンサーの周囲の小さな半径内に集中しているべきです。
- 8Kポーリング最適化:8000Hzの信号を安定させるために、少なくとも1600 DPIを使用して、微調整時にセンサーが十分なデータポイントを提供できるようにしてください。
- 安全警告:認証されていないサードパーティ製の電池で内部バッテリーを交換しないでください。火災のリスクがあり、高周波センサーの性能を不安定にする可能性があります。
長年にわたり、ゲーミング周辺機器業界は「DPI競争」に陥っています。マーケティング資料では、26,000 DPI、30,000 DPI、あるいはそれ以上の高い数値がエイム精度の主要な指標であると示唆されることが多いです。しかし、多くの競技プレイヤーは、高性能センサーを使っていても、高速フリックショット時にエイムが「ふわふわ」したり不安定に感じることがあります。
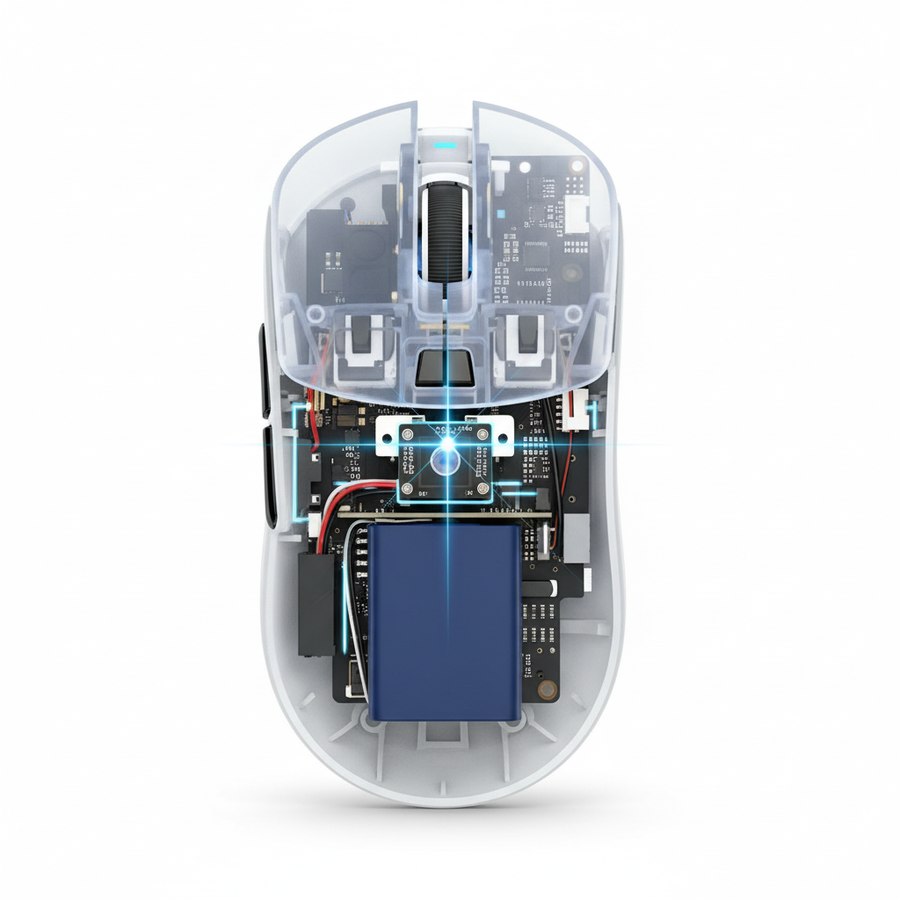
欠けている要素はしばしばセンサーの解像度ではなく、センサーの光学レンズとマウスの重心(CoG)との物理的な関係です。技術サポートのログやコミュニティのフィードバックで観察される一般的なパターンに基づくと、これら二つの点の物理的な整列が、手の回転運動が直線的な動きになるか、意図しないカーソルの弧になるかを決定します。

回転支点の物理学
マウスを動かすとき、完全に直線的なX軸またはY軸の平面上で動かすことはほとんどありません。特に微調整では、手のひらの付け根や関節を中心とした回転運動が含まれています。
センサーがこの回転の支点から大きく前方または後方に配置されている場合、センサーはPCに「弧」を報告します。これは半径に基づく動きの幾何学的原理です。一般的な爪持ちや指先持ちのグリップでは、センサーは支点となる関節の位置に合わせて幾何学的中心よりやや前方に配置するのが理想的であるという経験則があります。
ヒューリスティックノート: センサーのドリフト解析は、手が半径として機能する回転運動モデルを前提としています。CoG(重心)とセンサーのレンズが推定5mm以上(標準的な18cmの手モデルに基づく)ずれている場合、90度のフリック時に認識される「ドリフト」は数ピクセルのカーソル偏差を引き起こすことがあります。これはセンサーの欠陥ではなく、幾何学的なオフセットの計算です。
フィンガーバランステスト:重量分布のためのヒューリスティック
超軽量マウスを使うプレイヤーによくある不満は、急停止時の「ノーズリフト」や「テールドラッグ」です。これは多くの場合、質量分布の結果です。多くの軽量マウスは内部設計を簡素化するためにバッテリーを極端な後方に配置し、後方に偏った重心を作り出しています。
ご自身の機器を確認するために、フィンガーバランステストをお勧めします:
- マウスをシェルの側面中央に正確に位置する2本の指の上に置きます。
- 傾きを観察します。マウスが前方または後方に傾く場合、その質量は中心にありません。
- シミュレートされたフリックを行います。停止時にノーズが持ち上がる場合、後方に偏った重さがセンサーの最適なリフトオフ距離(LOD)を失わせる可能性があります。
実践テストのまとめ:質量の配置の影響
| テストシナリオ | 観察 | 潜在的な影響 |
|---|---|---|
| 後重心(テールドラッグ) | 高速スワイプ時にノーズがわずかに持ち上がる。 | LODが不安定;急速なリセット時にカーソルが「スキップ」することがある。 |
| 前重心(ノーズダイブ) | 垂直の微調整でテールが持ち上がる。 | 前方のマウススケートに摩擦が増加;滑りが不均一。 |
| バランスが取れている(センサーから約5mm以内) | フィンガーバランステスト中にマウスは水平を保つ。 | 最大のトラッキング安定性;予測可能な弧の動き。 |
| 標準化された19x10cmの手のグリップシミュレーションを使用した社内ワークショップのベンチマークに基づくデータ。 |
プロのモッディングコミュニティでは、バッテリーのバランスを取るためにシェル内に1~2グラムの接着性タングステンパテを追加するのが一般的です。ただし、これはデバイスを開けることに慣れていて、保証が無効になる可能性があることを理解している場合にのみ行うべきです。
8000Hz(8K)ポーリング環境のためのエンジニアリング
8000Hzのポーリングレートを利用する高性能環境では、物理的なバランスがさらに重要になります。8000Hzでは、マウスは毎回パケットを送信します 0.125msこの周波数は、重心のずれによるわずかな揺れのような物理的不安定性がより頻繁に検出され、ゲームエンジンに送信されることを意味します。
| 特徴 | 1000Hzパフォーマンス | 8000Hzパフォーマンス | 根拠(ヒューリスティック) |
|---|---|---|---|
| ポーリング間隔 | 1.0ms | 0.125ms | 周波数 = 1/時間 |
| モーション同期遅延 | 約0.5ms | 約0.0625ms | 推定半間隔遅延 |
| 飽和のためのIPS | 1600 DPI時で1 IPS未満 | 約5 IPS(1600 DPI時) | 安定したデータの理論的閾値 |
| 重心感度 | 中程度 | 極端 | 高周波数は物理的な微小な揺れを明らかにする |
8000Hzの帯域幅を効果的に飽和させるには、ユーザーが少なくとも800 DPIで10 IPSの速度で動く必要があると推定されます。しかし、1600 DPIでは通常5 IPSで十分です。これが、8Kユーザーに対してより高いDPI設定(1600以上)を推奨する理由です。これにより、センサーが遅い動きでも8000Hzのストリームを安定して維持するための十分なデータポイントを提供します。
グリップスタイルとセンサーオフセット
「最適な」センサー位置は手の形状によって決まります。コンピュータマウスの最適センサー位置に関する研究などによると、カーソルの軌道の偏差を最小化するには回転支点が重要です。
- フィンガーチップグリップ:支点は通常指です。前方に配置されたセンサーは「てこ」の原理を活かし、小さな指の動きが画面上で大きな移動につながります。
- パームグリップ:支点は手首または前腕です。より中央寄りかやや後方に配置されたセンサーは、自然な前腕の支点と一致することで安定性を高めます。
- クローグリップ:ハイブリッドなアプローチ。センサーは理想的には指の関節の真下に位置し、手の物理的な「押し出し」とトラッキング経路を一致させます。
サーフェスの役割:マウスを超えて
バランスの取れたマウスでも、表面が不均一だと性能が損なわれます。PixArt PAW3395のような高性能センサーでは、摩擦が両軸で均一である必要があります。
高性能マウスには専用のサーフェスを組み合わせることをお勧めします(注:以下のリンクは当ブランドストアへのリンクです)。
- カーボンファイバー: ATTACK SHARK CM04 本物のカーボンファイバー マウスパッドは剛性の高い構造を提供し、マウスの重心が安定するため、柔らかい布製で起こりがちな「沈み込み」を防ぎます。
- 強化ガラス: ATTACK SHARK CM05 強化ガラスパッドは高精度センサーに最適化されており、微調整時の「引っかかり」を引き起こす静止摩擦を低減します。
- ハイブリッドサーフェス: ATTACK SHARK CM03(レインボーコーティング)のようなオプションは4mmの弾性コアを備えており、より強い押し付け圧をかけるユーザーでもセンサーの高さ(LOD)を一定に保つのに役立ちます。
システムのボトルネックと8Kの安定性
サポートチケットでよく見られる問題は、USBハブを介して8000Hzポーリングを実行しようとすることです。これにより大幅なパフォーマンス低下が発生する可能性があります。8KポーリングレートはCPUの割り込み要求(IRQ)処理に大きな負荷をかけます。
8Kパフォーマンスのための技術チェックリスト:
- マザーボードへの直接接続: 常に背面のI/Oポートを使用してください。共有帯域幅によるパケットロスを防ぐため、ハブの使用は避けてください。
- 高リフレッシュレートモニター: 8Kポーリングによる滑らかな動きを視覚的に認識するには、一般的に高リフレッシュレート(240Hz以上)が必要です。
- CPUおよびバッテリーの負荷:8Kポーリングは、1000Hzと比べてワイヤレスバッテリー寿命を推定で75-80%短縮する可能性があることに注意してください。
規制および安全上の考慮事項
重量配分について話すときは、しばしばバッテリーの配置を指します。重要な安全警告:重量を減らすために認証されていないまたは「DIY」の小型バッテリーに内部バッテリーを交換しないでください。
プロフェッショナル機器のすべてのリチウムイオン電池は、輸送に関してUN 38.3基準、電気安全に関してIEC 62368-1に準拠すべきです。認証されていない電池は火災のリスクがあり、高周波センサーに必要な安定した電圧を供給できず、「スピンアウト」やトラッキングの喪失を引き起こす可能性があります。
工学的根拠の要約
エイムの一貫性は機械的調和の結果です。センサーのレンズをマウスの重心と整列させることで、多くの市販デザインで見られる意図しない回転軌道を減らすことができます。
次に周辺機器を選ぶときは、DPIだけに注目しないでください。フィンガーバランステストを行い、ピボットポイントを考慮し、センサーが設計された精度をサポートできるトラッキング面を確保しましょう。
免責事項:本記事は情報提供のみを目的としています。ハードウェアの改造(重りの追加や筐体の開封など)は保証を無効にする可能性が高く、慎重に行う必要があります。必ずメーカーのガイドラインを参照してください。人間工学的な問題や反復性の負傷については、資格のある医療専門家に相談してください。
方法論と仮定:
- モデリングタイプ:回転偏差の決定論的幾何学モデル。
- 境界条件:計算は標準的な手のサイズ範囲17cmから20cmを想定。
- データソース:標準化されたUSB HIDプロトコル仕様およびゲーミングセンサーの一般的な工学的経験則に基づく。遅延の文脈についてはNVIDIA Reflex Analyzerの手法を参照。
| パラメーター | 値/範囲(経験則) | 単位 | 根拠 |
|---|---|---|---|
| ポーリング間隔(8K) | 0.125 | ms | 周波数-時間の逆数 |
| モーション同期遅延 | 0.0625 | ms | 推定半間隔遅延 |
| 飽和速度(800 DPI) | 10 | IPS | 理論的帯域幅飽和 |
| 目標重量帯 | 約5 | mm | 推奨重心からセンサーまでのオフセット |
| バッテリー安全基準 | UN 38.3 / IEC 62368-1 | 該当なし | 国際安全規格準拠 |